Object manipulation experiment by position controlled Euglena group generated by spot laser beam (Object size: 1000x50x18^im,

Fluorocarbon resin
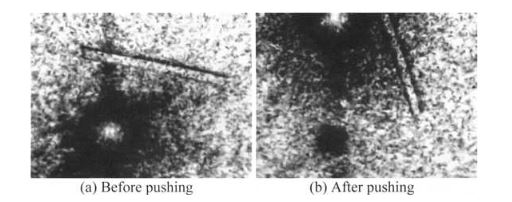
bject manipulation experiment by position controlled Euglena group generated by 1mm line scanned laser beam (Object size: 1000x50x18|Lim, Fluorocarbon resin) There is a limitation for the target object that can be moved by this method. Weight (force to the ground surface of the pool) and shape of the object dominate it. The densities of metals, such as aluminum or steel, are too large to push. There-fore, metal cannot be moved by the Euglena group. If the shape is the same to the
object of Fig. 10, many of plastic films can be moved by this method, such as fluorocarbon resin, polyester, polyimide, polypropylene and polyethylene terephthalate. The effect of the friction force and the adsorption force from the bottom surface is large. Therefore, it is very important to maintain the contact condition. The effect of the surface tension force is also large. Therefore, if the object is lighter than the water, sealed type experimental pool is better than the open air type pool. Basically, the transportation of the object is getting easier as the contacting area to the Euglena is getting larger, and as the force to the bottom surface of the pool is getting smaller. In the case of thickness t=18|am fluorocarbon resin, this system can move within 500x500 |Lim rectangular size object. If the size of the object is near the limit, the transportation speed decreases and constant transportation be-comes difficult. Fig. 12 summarizes the results of the object transportation experiments by Euglena group. In these experiments, the rectangle shaped objects made of fluorocarbon resin were prepared. The widths of the objects were 1mm constant and the lengths were varied between 50 and 500 |Lim to change the weights. The population den-sity of the Euglena solution was 3210 cell/mm^. The Euglena group was formed by the 500)Lim straight line scanning laser beam and the beam was moved between 0.68 and 6.5 |am/s. The results were estimated whether the objects were trans-ported to the setting distance or not. It was very difficult to maintain the friction {= shapes of the edge of the trans-ported object), therefore, the results were varied widely. However, the maximum transported weight in these experiments was 70nN and the Euglena group can carry heavier object if the moving speed is slower. It is necessary to improve the experimental conditions especially the shapes of the edges of the objects to maintain the friction force to measure the exact force gen-erated by Euglena group

Relationship between the moving speed of the scanning laser beam and the weight of the transported object moved by the line shaped Euglena group
Conclusion
Above-mentioned experimental results showed the possibility to use the protozoa for the living micromanipulators. One meaning, this system is an example of a shapeless mechanical system. If we need special shape, we can make any desired shape by gathering Euglena. This is a common dream of micromachine if we con-sider Euglena as living micromachines. To the future, three dimensional motion control methods shall be developed. The application to the industrial field or the medical science has to be investigated.
Acknowledgements
The authors would like to their deep gratitude to Prof Yuji Tsukii of Hosei Uni-versity for giving them the seed of Euglena. Their deep gratitude is also to those graduating students, Yoji Toyoda, Takayuki Kawaguchi, Yasuo Kawai, Tetsuro Mishima, Wataru Sasaki, Hitoshi Yagi and Yoshitaka Matsumoto who joined them in the experiment and helped the authors. This work was partially supported by the Research Institute of Technology of To-kyo Denki University under Grant Q03S-07


No comments:
Post a Comment